![]()
![]()
New Cost-Effective “Standard” and “High-Precision”
MEMS IMU Models for Attitude Control
in Construction & Agricultural Machinery
NEW

The “Standard Model” achieves a cost reduction compared to the previous TAG310 model.
The “High-Precision Model” offers improved accuracy over the previous TAG310 model.
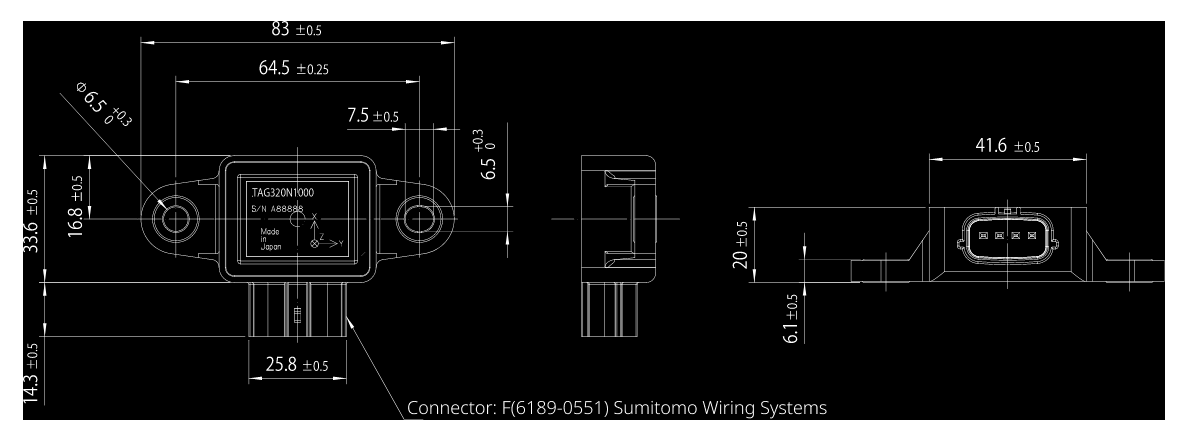
The case design, connectors, waterproof and dustproof features, and communication interfaces are the same as the previous TAG310 model, ensuring compatibility.
| Comparison Items | Standard Model TAG320N1000 |
High-Precision Model TAG320N2000 |
|
|---|---|---|---|
| Price | ● | ○ | |
| Accuracy | Angular Velocity Error | ○ | ● |
| Acceleration Error | ○ | ● | |
| Attitude Angle Accuracy | ○ | ● | |
| In-run Drift | ○ | ● | |
| Vibration and Shock Resistance | ● | ● | |
●:Superior to the conventional model
○:Equivalent to the conventional model
|
NEW
Standard Model TAG320N1000 |
NEW
High-Precision Model TAG320N2000 |
Base Model TAG310N1000 |
|
|---|---|---|---|
| Protective Structure | IP67 (Water and dust protect) | ||
| Operating Temp. Range | -40 to +85 ℃ | ||
| Power Supply Voltage | +8 to +32V DC | +8 to +28V DC | |
| Power Consumption | 1W Max | ||
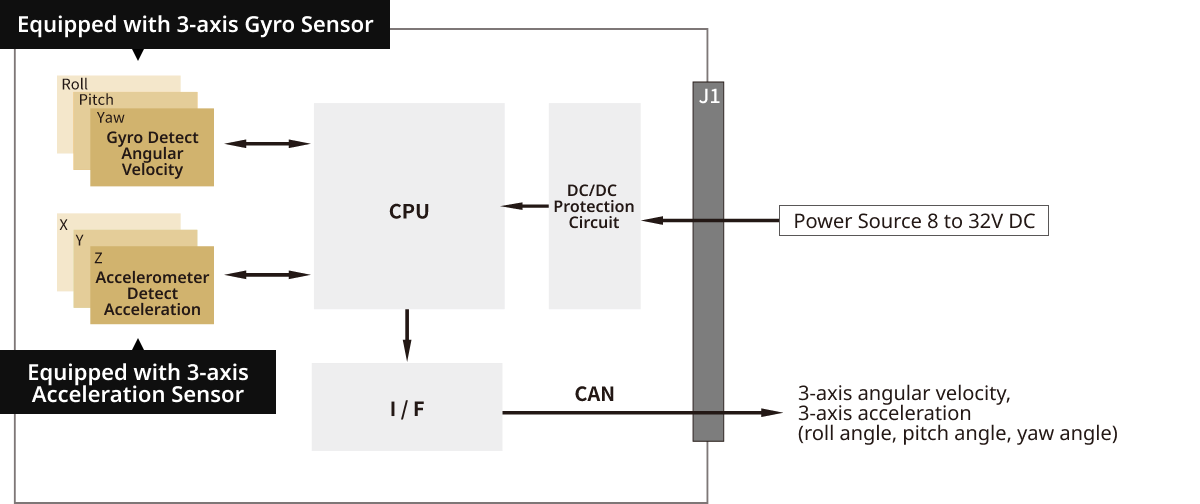
| Communication Interface | CAN Standard + Extensions *Custom configurations can support CANFD |
CAN Standard + Extensions | |
| Output Cycle | 1,000Hz Max | ||
| Output Data | 3-axis angular velocity, 3-axis acceleration (roll angle, pitch angle, yaw angle) | ||
| Angular Velocity | ±200°/s | ||
| Acceleration | ±4G (Standard) | ±6G (Standard) | ±4G (Standard) |
|
NEW
Standard Model TAG320N1000 |
NEW
High-Precision Model TAG320N2000 |
Base Model TAG310N1000 |
Remark | ||
|---|---|---|---|---|---|
| Angular Velocity | Gyro Range | ±200°/s | |||
| Gyro Bias | 0.2°/s rms | 0.1°/s rms | 0.2°/s rms | Room temp. | |
| ±0.2°/s | ±0.1°/s | ±0.2°/s | Ambient temp. | ||
| Gyro Scale Factor Error | 0.2% FS rms | 0.1% FS rms | 0.2% FS rms | FS : Full Scale | |
| Angle Random Walk | 0.2°/√h | 0.02°/√h | 0.5°/√h | By Allan's variance | |
| Bias Instability | 10°/h | 1°/h | 30°/h | By Allan's variance | |
| Frequency Response | 50Hz | 30Hz | 30Hz | –3dB | |
| Acceleration | Range | ±39.2m/s2 | ±60m/s2 | ±39.2m/s2 | |
| Bias | 0.0392m/s2 rms | 0.0196m/s2 rms | 0.0392m/s2 rms | Room temp. | |
| 0.098m/s2 rms | 0.049m/s2 rms | 0.098m/s2 rms | Ambient temp. | ||
| Scale Factor Error | 0.5% FS rms | 0.2% FS rms | 0.5% FS rms | ||
| Noise | 0.098m/s2 p–p | ||||
| Frequency Response | 50Hz | 30Hz | 40Hz | –3dB | |
| Attitude Angle | Roll Angle Detection Range |
±180° | |||
| Pitch Angle Detection Range |
±90° | Around ±90°, the roll and heading become indeterminate. |
|||
| Yaw Angle Detection Range |
±180° | ||||
| Static Accuracy (Roll & Pitch) |
0.5° rms | 0.1° rms | 0.5° rms | Room temp. | |
| In-run Drift (Yaw) |
0.03°/s rms | 0.002°/s rms | 0.03°/s rms | Within 5 minutes after performing offset cancellation following warm-up |
|
| TAG320 | |
|---|---|
| Vehicle Speed (VS) Input I/F | CAN |
| Power Protection Circuit | 〇 |
| GNSS Input I/F | ― |
| CAN ID Allocation | 〇 |
| Compatible with Extended CANID | 〇 |
| Initial Attitude Alignment Function | 〇 |
| Definition of Axis | 〇 |
| Offset Cancellation Function | 〇 |
| Azimuth Reset Function | 〇 |
| Leveling Constant Adjustment Function | 〇 |
| CAN Cable Termination Process | ― |

For measuring the attitude of cabins and boom/arm angles of shovels, loaders, bulldozers, cranes, etc.

For attitude measurement and rollover prevention of tractors, rice transplanters, combines, etc.

Straight-line assistance and automatic driving for robotic lawn mowers

Forklift posture detection, straight-line assistance, slope detection, rollover prevention, driving monitoring

Autonomous driving, slope detection, and status monitoring for unmanned transport vehicles (AGV, AMR)

Autonomous driving, attitude detection, slope detection, rollover prevention, and driver monitoring for automobiles and small mobility vehicles

Attitude detection for ships and underwater equipment