![]()
![]()
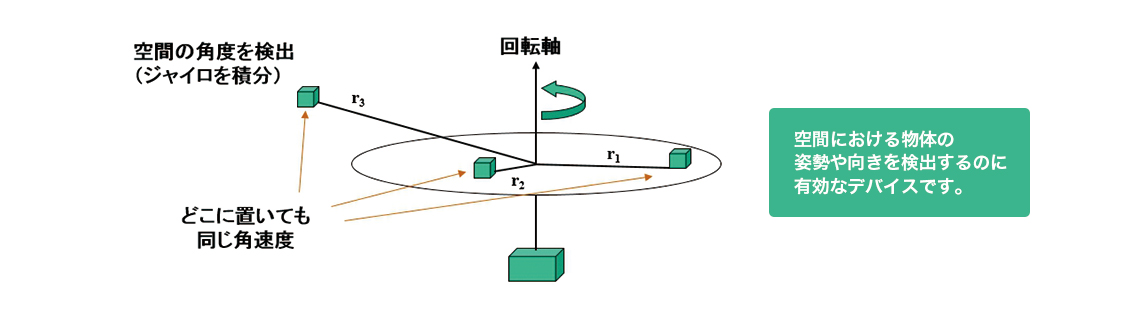
ジャイロとは3次元空間を動く”モノ”の姿勢・位置・方位を計測するセンサで発明から約100年の間に、その原理・方式が 大きく変遷してきました。多摩川精機は、時代の変遷の中で多様な原理を応用したジャイロを開発・製品化してきました。

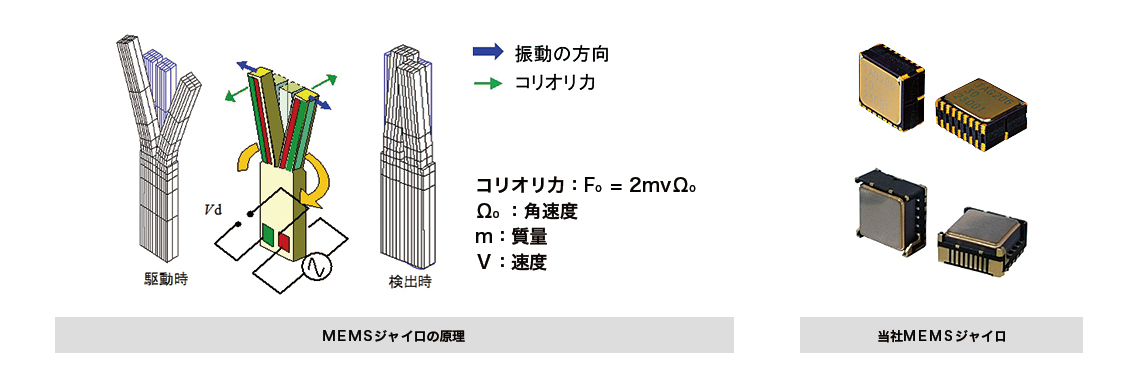
| 原 理 | 「速度を持った質量に角速度が加わると、速度方向と回転軸の両方に直交する方向にコリオリ力が生じる」という原理を使用します。 |
|---|
当社MEMSジャイロは音さ型の素子を振動させて、回転運動により加わるコリオリ力により振動モードが変化することで発生した電気をセンサ素子上に配置された電極で検出します。
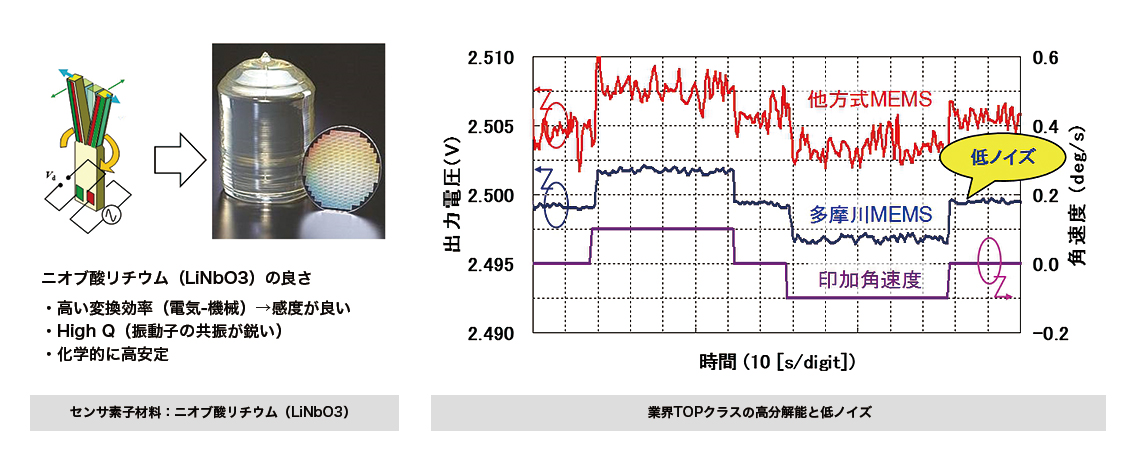
当社MEMSジャイロのセンサー素子は材料にニオブ酸リチウムを使用しています。
他方式に比べ電気エネルギーへの変換効率が高いため、小型でありながら業界TOPクラスの高分解能と低ノイズを実現しています。
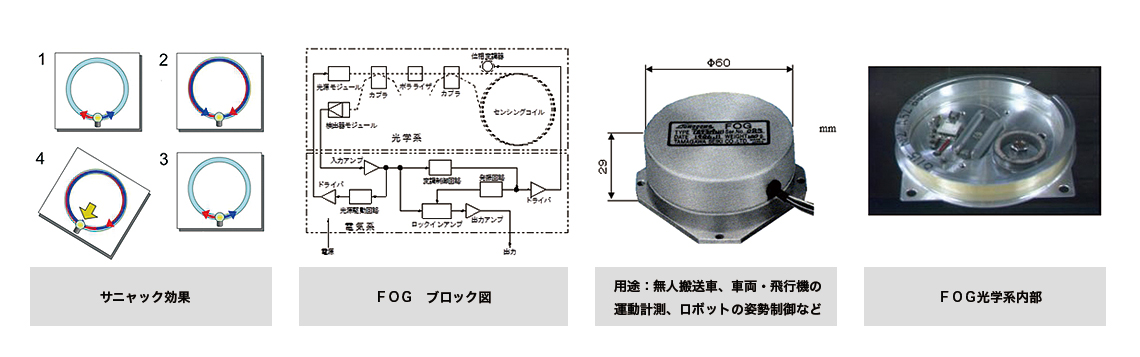
| 原 理 | 位相の揃った光を、センシングコイルに右回りと左回りに走らせて干渉させる。角速度がセンシング部に加わると、サニャック効果により両回り光に位相差が発生し、干渉パワーが変動する。これを検出して出力する。 |
|---|
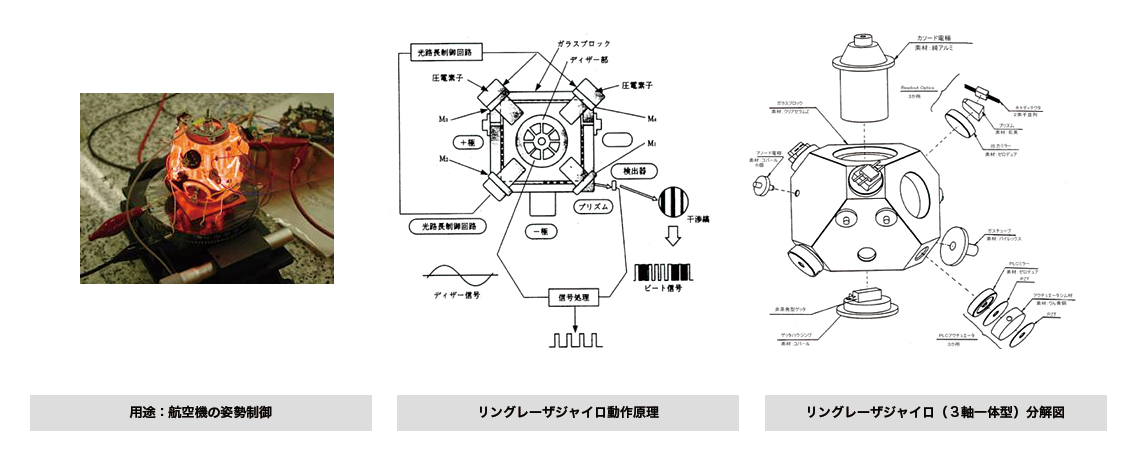
| 原 理 | ガラス細管と低損失ミラーでリング型光共振器を構成し、その中でHe-Ne媒質を放電させると左右両周り(CW,CCW)のレーザ光が発生する。角速度が加わると、サニャック効果によりCW,CCW光間に周波数差が生じる。CW,CCW光をプリズムで干渉させ、干渉縞の本数をカウントして角度情報を読み取る。 |
|---|
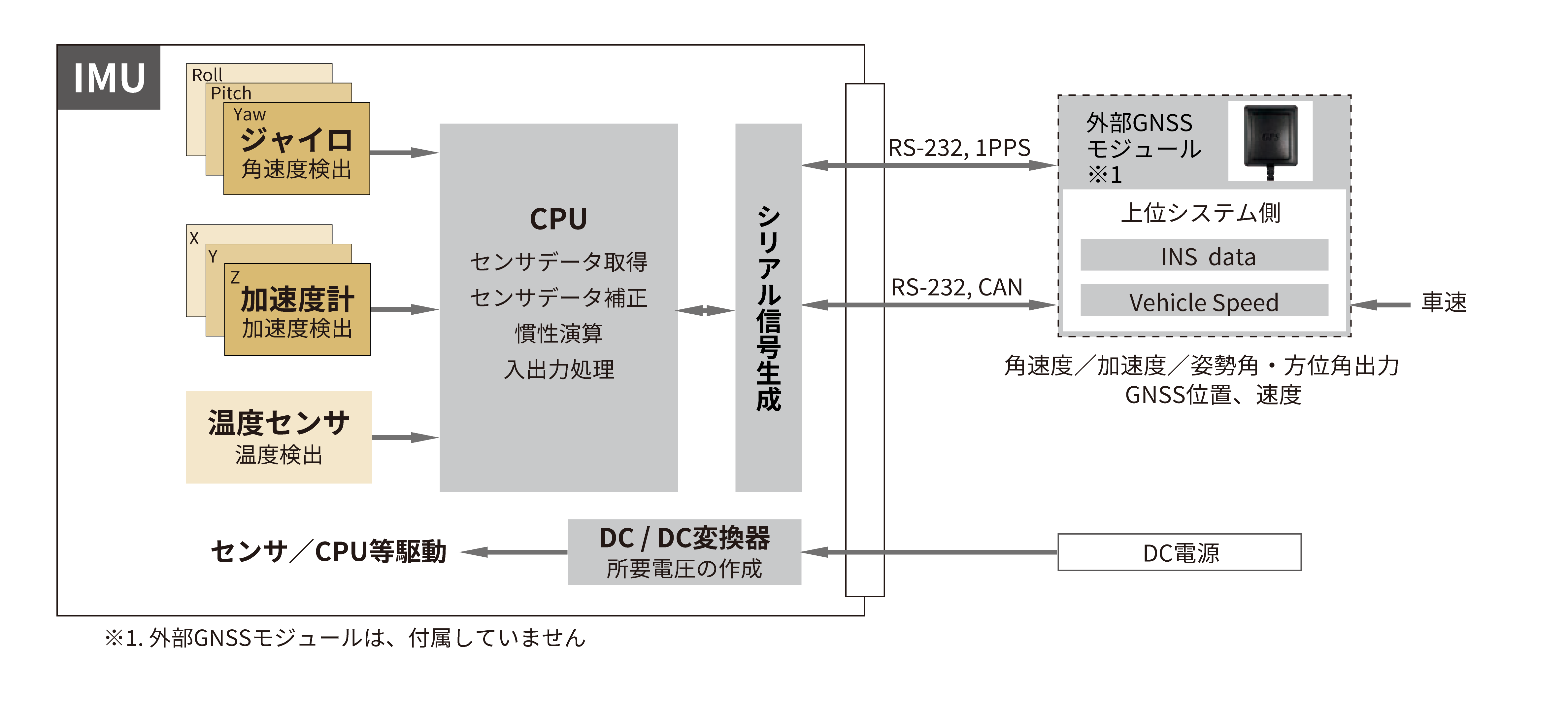
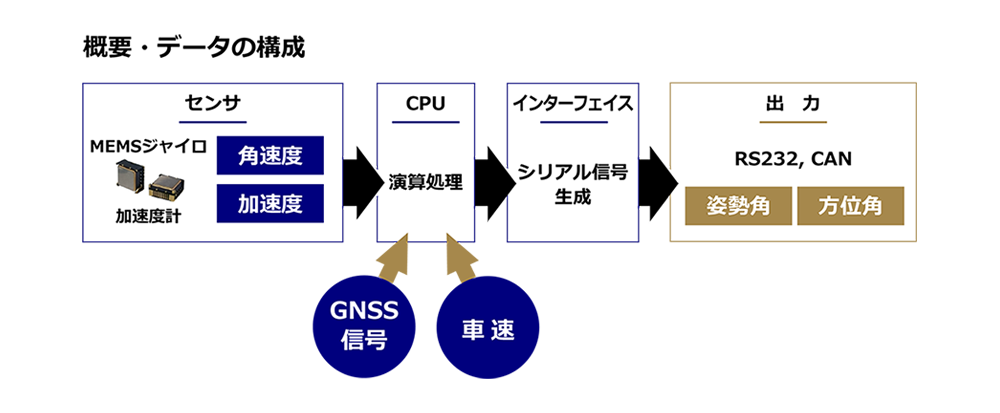
当社のIMUは、3軸角速度、3軸加速度を検出・出力し、さらにそれらより姿勢角(ロール、ピッチ)、方位角(ヨー)を演算して出力します。
多摩川精機のIMUには、小型・軽量・低価格モデルから超高精度モデルまでラインナップがあり、用途に合わせてお選びいただけます。
| 種 類 | MEMS IMU | MULTI SENSOR | FOG 3軸慣性装置 | MRLG搭載 姿勢方位基準装置 |
|---|---|---|---|---|
| 外 観 |  |
 |
 |
 |
| 内蔵センサ | MEMSジャイロ(3軸) MEMS加速度計 |
MEMSジャイロ(2軸:姿勢角) FOG(1軸:方位角) MEMS加速度計 |
FOG(3軸) MEMS加速度計 |
MRLG(3軸一体型) サーボ加速度計 |
| 特 徴 | 小型・軽量 | 高精度 | 高精度 | 超高精度 |
| 詳 細 | MEMS IMU 製品ページ |
MULTI SENSOR 製品ページ |
FOG 3軸慣性装置 製品ページ |
MRLG搭載姿勢方位基準装置 製品ページ |
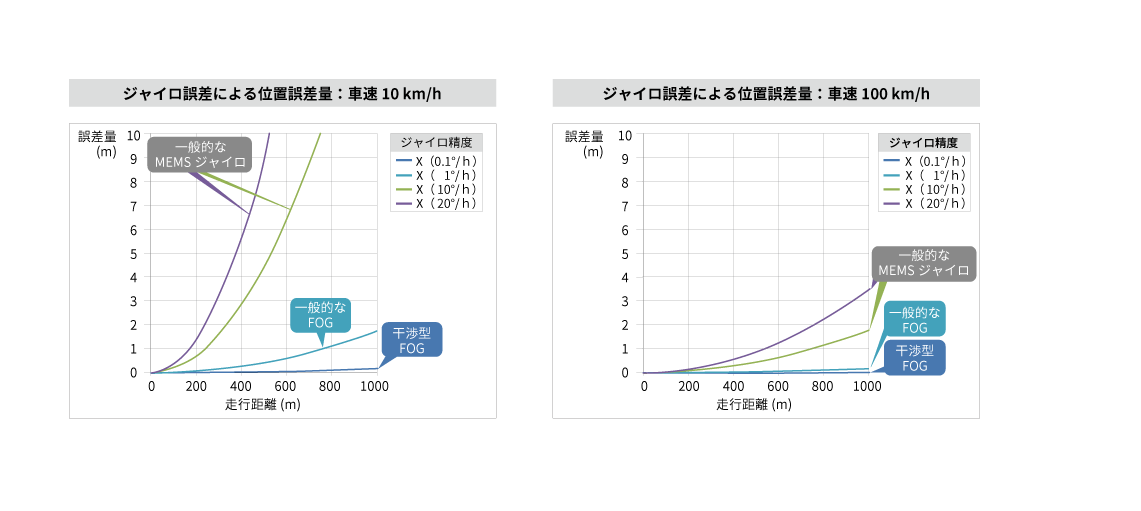
誤差数cm 級の高精度な全地球航法衛星システム(GNSS)の利用が可能になり、自動運転が身近なものになりつつあります。
しかし、トンネル内や高架下など衛星からの電波が遮断される場所や、アーバンキャニオンと呼ばれるマルチパス環境下では
測位精度が悪化してしまいます。ジャイロはそのようなGNSS 非測位時の補間センサとして使われます。
推測航法ではジャイロの積分角度(方位角)と走行距離計や加速度センサから算出した距離を掛け合わせて位置を計算するため、
方位角誤差に比例して位置はドリフトします。したがって自己位置推定の精度には高精度なジャイロ(方位角計測)が必要になります。
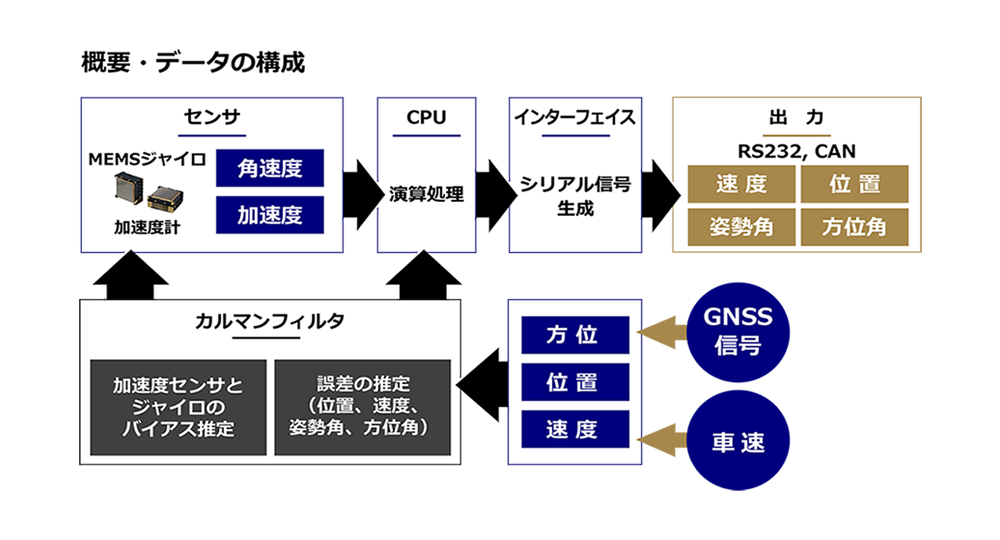
多摩川精機のMEMS IMUには、演算方法がレベリング演算と複合航法演算の2種類あり、用途によって最適な演算方法をご提案いたします。
| 演算方法 | GNSS | 出力項目 | 用途例 | ||||
|---|---|---|---|---|---|---|---|
| センサ生値 ・角速度 ・加速度 |
姿勢・方位 |
GNSS |
自己位置推定 ・緯度 ・経度 ・高度 |
センサ バイアス推定 ・角速度 ・加速度 |
|||
| レベリング演算 | 接続無し | 〇 | 〇 | × | × | × | 姿勢・方位計測、 運動計測、振動計測、 状態監視、横転防止、 パワーアシスト など |
| 接続有り | 〇 | 〇 | 〇 | × | × | ||
| 複合航法演算 | 接続有り (必須) |
〇 | 〇 | 〇 | 〇 | 〇 | GNSS遮断時の自己位置推定 (自動運転、自律走行)、 高精度姿勢・方位計測 |
|
レベリング演算と複合航法演算のPDF資料はこちらから |
第二次世界大戦に入ってから、航空機用小型ジャイロおよびロケットの誘導用ジャイロの研究が盛んになった。ジャイロの研究は小型、軽量そして高精度という目標があった。主たるジャイロは姿勢ジャイロとレートジャイロであった。それらは戦略兵器の誘導、戦略巡航ミサイル、飛行機の慣性航法装置、弾道ミサイルの誘導、宇宙ロケットの誘導などに活用された。
1970年代の後半までは、機械式ジャイロの全盛時代であった。高い精度が要求される航法装置は、複数のジンバルからなるステーブルプラットホーム方式であった。これに使われるジャイロは角度ならびに角速度の検出範囲は狭くてもよいが、ドリフトは極限まで小さくする必要があった。この種のジャイロをプラットホーム用ジャイロと呼んでいた。1970年代は、ストラップダウン用ジャイロが使われ始めた時期でもあった。
ストラップダウンは、プラットホームに相対する言葉としてよく用いられてきた。すなわち、検出範囲が広いレートジャイロを直交3軸に配置して、その角速度を解析的に計算することによって姿勢を求めるというものである。この方式は、従来のプラットホームと同じ役割を果たすものである。これは、コンピュータの発達という時代背景があったゆえの産物である。
1980年は、リングレーザジャイロを用いたストラップダウン方式の慣性航法装置がボーイングおよびエアバスの航空機に初めて採用された年である。この頃から、ストラップダウン方式が徐々に増加した。同時に従来のプラットホーム方式が徐々に少なくなる傾向を示した。
1980年から2000年は、「こま」式の回転ジャイロに代わって非回転ジャイロの実用化が広かった時代である。その1つの光学式ジャイロでは、リングレーザジャイロが1980年代に実用化され、その後の1990年代に入って光ファイバジャイロが実用化された。
一方、現在ガスレートジャイロを呼んでいる流体式ジャイロや振動ジャイロの研究開発は1970年代に米国で盛んに進められ、高い性能を得ることはできないが長寿命および耐環境性に優れ、そして低コストであるという特徴が日本の産業界で強い関心をもたれることになった。従来の防衛産業に関わる既存ジャイロメーカーに加えて、民需産業に関わってきたメーカーがジャイロの開発に力を注ぎ始めた時期でもある。
この頃から、ジャイロは高価で寿命が短いという従来のイメージが大量生産の自動車やビデオカメラに採用されるようになって、大きく変わってきた。日本の自動車メーカー(ホンダ)が、日本の防衛プログラム向けを対象に開発された流体式ジャイロ(ガスレートセンサ)に着目し、その低コスト化と性能向上に成功し、世界で最初のジャイロ式カーナビを1980年代の初めに発表した。これはジャイロが一般産業用に使われたという点で、民需関連メーカーに大きなインパクトを与えたようである。
その後多くの民需関連メーカーが振動ジャイロや光ファイバジャイロの開発に力を注いだ。この流れはMEMS(Micro Electro Mechanical System)技術と呼ばれるシリコンをベースにした小型ジャイロ開発の流れに影響を与えたと考えられる。MEMS技術を応用したジャイロは、今後さらにその実用化が広まるものと期待されている。ジャイロが従来の軍用用途を主流にしていた時代から、民需用途への広がりを見せる時代になってきた。
2020年1月
方位角0.1°/hの実力を備えた「i-FOG」と、姿勢角精度0.1°を誇る当社MEMS IMUの製品技術を組み合わせた新しいコンセプトの製品「MULTI SENSOR」を開発する。高い精度を求められる自動運転や大型建機の自動化などで、多くのお客様に導入された。
2023年12月
産業用車輛や作業ロボットにおけるICT化、EV化、IoTへの対応を目的として小型・低価格、耐環境性の強化を実現した当社として第四世代となるMEMS IMU「TAG310シリーズ」をリリースした。
2025年6月
MEMS IMUの内蔵センサを刷新することで、従来モデルよりもさらに低価格化を実現した「普及モデル」と、さらなる⾼精度化を達成した「⾼精度モデル」の2種類をそろえた第五世代のMEMS IMU「TAG320」をリリースした。